دانلود شبیه سازی مدل خوردگی میله روتور ماشین القایی

موضوع : شبیه سازی مدل خوردگی میله روتور ماشین القایی تحت شرایط پیشرفت خطا
چکیده
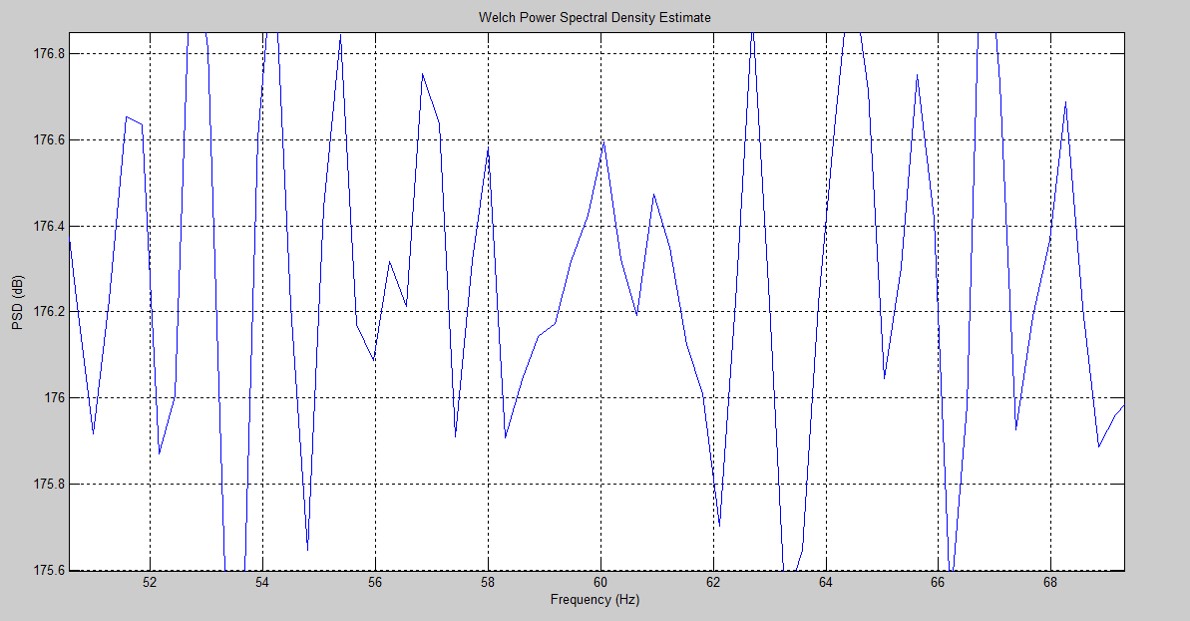
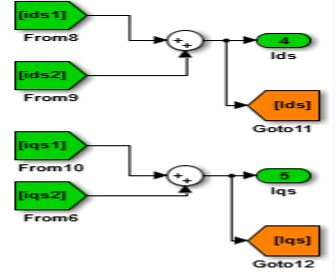
برای شبیه سازی میله های روتور ماشین القایی از تئوری الکترومغناطیسی استفاده شده است.اندوکتانس پراکندگی مدل خوردگی یک میله روتور با توجه به قانون آمپر ناشی از انرژی مغناطیسی،اندوکتانس،جریان وشدت میدان مغناطیسی می باشد.اندوکتانس پراکندگی و مقاومت میله روتور وقتی میله روتور زنگ می زند تغییر می کند.علاوه براین اثر پوستی نیز برای ساختن مدل کاربردی میله های روتور باید مورد توجه قرار گیرد.این تغییرات مقاومت و اندوکتانس پراکندگی در نتیجه شبیه سازی موتورتاثیر می گذارد و مشخص می شود که پیشرفت خطا در یک میله روتور با آنالیز طیفی هارمونیکهای جریان استاتور قابل تشخیص می باشد.
معرفی
موتورهای القایی پرکاربردترین ماشینهای الکتریکی هستند،از این رو تعداد زیادی از پژوهشگران در مورد روشهای عیب یابی موتور برای جلوگیری از توقف ناگهان آن مطالعه کرده اند.اگر یک موتور با میله های شکسته برای مدت زمان طولانی بدون علائم قابل کشف به کارگیری گردد،تمام سیستم شامل موتور شکسته ممکن است آسیب جدی ببیند.عیب یابی آنلاین موتور موثرترین راه برای نگهداشتن پیوسته موتور تحت شرایط سالم می باشد.
یکی ازشیوه های عیب یابی آنلاین موتور استفاده از شیوه آنالیز جریان موتور(MCSA )می باشد که هارمونیکهای غیر عادی در جریان استاتور موتورهای دارای خطا را پیدا می کند.
مزیتهای MCSAعبارتند از: تخمین نزدن پارامترهای موتور،سادگی سنسورها و نصب آنها و از همه مهمتر اینکه در این شیوه برای عیب یابی نیازی به ایستادن موتور و سیستم نمی باشد.
شیوه های شبیه سازی براساس شیوه تابع سیم پیچی(WFM)می باشد که فضای هارمونیکها را در ماشین الکتریکی تخمین می زند،از WFM مشخص است که فقط اندوکتانسهای متقابل سیم پیچی استاتور ومیله های روتور، پارامترهای متغیر با زمان هستند.مقاومتها و اندوکتانسهای پراکندگی سیم پیچ استاتور و میله های روتور پارامترهای ثابتی با زمان هستند.اگر موتور دارای خطا باشد،مقاومت و اندوکانس پراکندگی قسمتهای خورده شده و شکسته شده با پیشرفت خطا پیشرفت می کنند.
مطابق با مدل خوردگی پیشنهاد شده، MCSA می تواند خطای یک میله خورده شده را به اندازه پیشرفت خطای یک میله روتور کشف کند.
فهرست :
روشهای متداول تشخیص خطا در ماشینهای الکتریکی
آنالیز جریان موتور MCSA
مزیتهای MCSA
مراحل تشخیص خطا به شیوه MCSA
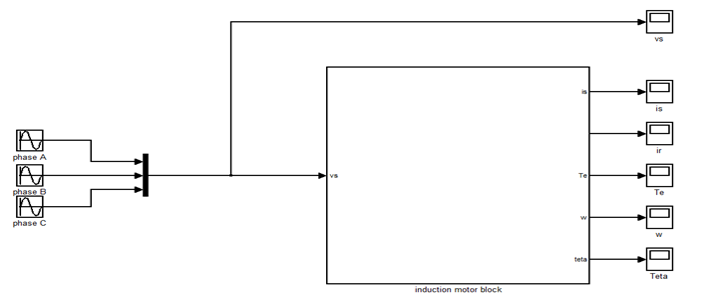
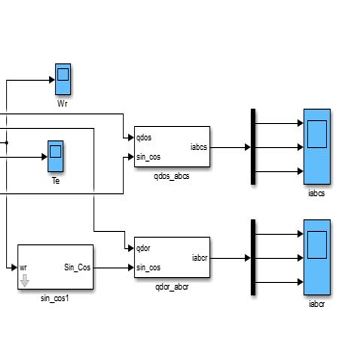
مدل شبیه سازی موتورالقایی
مدل خوردگی میله روتور در پیشرفت خطا
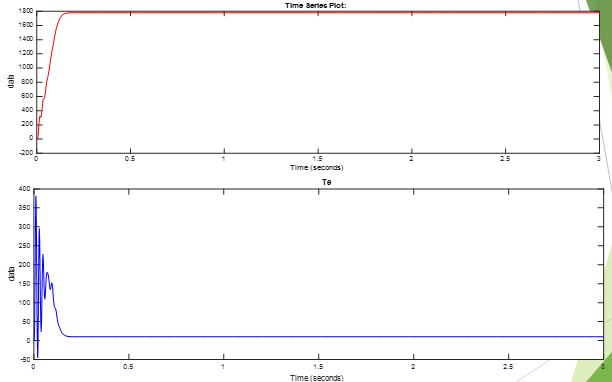
نتایج و شبیه سازی
منابع
قسمت هایی از شبیه سازی و نتایج
برای دانلود کامل شبیه سازی به همراه توضیحات کلیک کنید
![]()
دانلود پروژه کاهش ظرفیت موتور القایی در ترکیب ولتاژهای نامتعادل-همراه با طراحی متلب

عنوان پروژه : دانلود پروژه کاهش ظرفیت موتور القایی در ترکیب ولتاژهای نامتعادل-همراه با طراحی متلب
Deratingof Induction Motors Operating Witha Combination of Unbalanced VoltagesandOver or Undervoltages
فهرست
مقدمه ای بر موتور القایی
مقدمه ای بر نامتعادلی ولتاژ
مولفه های متقارن و کاربرد آنها در بررسی خطای های موتورالقایی
تعاریف ضریب نامتعادلی ولتاژ
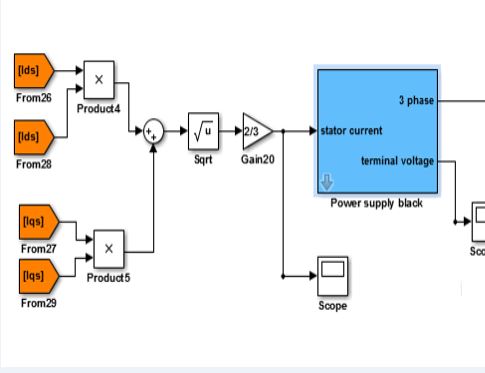
مدل موتور القایی
شبیه سازی
نتایج شبیه سازی
نتیجه گیری
منابع
قسمتی از شبیه سازی و نتایج
با دانلود این پروژه شما می توانید کل شبیه سازی و نتایج را ببینید
![]()
دانلود شبیه سازی شکستگی میله رتور در موتور القایی سه فاز با متلب

موضوع پروژه: شکستگی میله رتور در موتور القایی سه فاز
نام لاتین : Modeling and Analysis of Three Phase Induction Motor With Broken Rotor Bar
این پروژه دارای طراحی با متلب می باشد
فایل بصورت PDF و Power Point است
فهرست :
مقدمه
معرفی موتور القایی
اجزای موتور القایی
اصول کار موتور القایی
مزایا و معایب موتور القایی
عوامل ایجاد شکستگی میله رتور
نتایج حاصل از تنش های شکستگی میله رتور
مدل موتور القایی
روش های مانیتورینگ خطا در موتور القایی
روش هوای متدامل خطا
آنالیز مشخصه جریان استاتور
شبیه سازی و نتایج
نتیجه گیری
منابع
![]()
تشخیص خطای حلقه به حلقه سیم پیچی استاتور موتورهای القایی سه فاز قفس سنجابی با در نظر گرفتن اثر اشباع مغناطیسی

عنوان تحقیق: تشخیص خطای حلقه به حلقه سیم پیچی استاتور موتورهای القایی سه فاز قفس سنجابی با در نظر گرفتن اثر اشباع مغناطیسی
فرمت فایل: word
تعداد صفحات: 112
شرح مختصر:
پایش وضعیت موتورهای القائی، یک فناوری کاملاً ضروری و مهم برای تشخیص به هنگام عیوب مختلف در مرحله ابتدائی است. که میتواند از شیوع عیبهای غیرمنتظره در همان مراحل ابتدائی جلوگیری کند. تقریباً 30 تا40% عیوب موتورهای القائی مربوط به عیبهای استاتور هستند. در این پایاننامه بررسی جامعی از عیوب مختلف موتور القائی، دلایل بوجود آورنده و روشهای مختلف مدلسازی این عیوب صورت گرفته است. در ادامه شاخصهای مختلف تشخیص عیب اتصال حلقه به حلقه سیمپیچی استاتور معرفی گردیده و از جنبههای مختلف مورد بررسی و مطالعه قرار گرفتهاند.
ایده اصلی این پایاننامه شبیهسازی موتور القائی معیوب با عیب اتصال حلقه به حلقه سیمپیچی استاتور با در نظرگرفتن اثر اشباع مغناطیسی است و شبیهسازی موتور القائی سه فاز معیوب با عیب اتصال حلقه به حلقه سیم پیچی استاتور، با و بدون در نظرگرفتن اثر اشباع مغناطیسی انجام گرفته است. سپس شاخصهای مختلف این نوع عیب استخراج شده و در هر دو شرایط خطی و اشباع با نتایج عملی مقایسه شدهاند. همچنین در این پایاننامه شاخص جدیدی با ویژگیهای مطلوبتری جهت شناسایی عیب حلقه به حلقه سیم پیچی استاتور معرفی گردیده است و در نهایت مطلوبترین شاخص از بین شاخصهای موجود معرفی شده است.
کلمات کلیدی : عیب حلقه به حلقه سیمپیچی استاتور، موتور القایی، اشباع مغناطیسی، الگوریتم ژنتیک، پدیده نوسان پاندولی، اندوکتانس استاتور
فهرست مطالب
چکیده
فصل اول
مقدمهای بر عیوب مختلف موتورهای القایی سه فاز و معرفی شاخصهای عیب حلقه به حلقه سیمپیچی استاتور
1-1- مقدمه
شکل1-1- انواع خطاها در سیم پیچ استاتور
1-1- عوامل پدید آورنده خطاهای سیمپیچ
1-2-1- تنشهای حرارتی
1-2-2- تنشهای الکتریکی
1-2-3- تنشهای مکانیکی
1-2-4- تنشهای محیطی
1-1- روشهای تشخیص خطا در سیمپیچ استاتور
1-3-1- روشهای تهاجمی
1-3-1-1- نویز صوتی
1-3-1-2- لرزش
1-3-1-3- دما
1-3-1-4- تخلیه جزیی
1-3-1-5- آنالیز گاز
1-3-1-6- ضربه
1-3-1-7- سرعت زاویهای لحظهای
1-3-1-8- گشتاور فاصله هوایی
1-3-1-9- شار مغناطیسی
1-3-2- روشهای غیرتهاجمی
1-3-2-1- جریان خط استاتور
1-3-2-2- توان
1-3-2-3- ماتریس امپدانس توالی
1-3-2-4- ولتاژ موتور
1-3-2-5- پدیده نوسان پاندولی
1-3-3- روشهای مبتنی بر هوش مصنوعی
1-3-3-1- روشهای مبتنی بر سیستمهای خبره
1-3-3-2- روشهای مبتنی بر منطق فازی
1-3-3-3- روشهای مبتنی بر شبکههای عصبی مصنوعی
1-3-3-3-1- شبکههای عصبی تحت نظارت
1-3-3-3-2- شبکههای عصبی نظارت نشده
1-3-3-4- روشهای مبتنی بر شبکههای فازی- عصبی
1-3-3-5- روشهای مبتنی بر تخمین پارامتر
فصل دوم
بستر آزمایشگاهی
2-1- مقدمه
2-1- موتور، تغذیه و بار گذاری
2-2-1- موتور
جدول 2-1- اتصالات سر سیمهای کلاف معیوب برای ایجاد خطای مصنوعی
شکل2-1- نحوهی سیمپیچی کلاف معیوب
شکل2-2- دیاگرام سیمپیچی موتور مورد استفاده
2-2-1- تغذیه موتور
2-2-1- بارگذاری موتور
2-2- جمع آوری داده های تجربی
2-2-1- حسگرهای بکار رفته و مدارات واسط آنها
شکل2-3- مجموعه ست آزمایشگاهی مورد مطالعه
فصل سوم
مدلسازی و شبیهسازی رفتار موتور القایی سهفاز قفس سنجابی تحت عیب سیمپیچی استاتور
3-1- مقدمه
3-2- مدل مدارهای مزدوج چندگانه موتور القایی در شرایط سالم
3-3- محاسبه عناصر ماتریسهای اندوکتانس و مشتق آنها
3-4- اثر اشباع مغناطیسی در رفتار ماشین سالم
3-4-1- تابع معکوس فاصله هوایی در ماشین القایی اشباع پذیر
شکل3-1- منحنی عمومی تغییرات چگالی شار مغناطیسی حول فاصله هوایی (بالا) و منحنی طول معادل فاصله هوایی (پایین) در یک موتور القایی دو قطب اشباع شده، دامنه هارمونیک اصلی فضایی چگالی شار فاصله هوایی است.
3-4-2- تعیین موقعیت چگالی شار مغناطیسی در فاصله هوایی
شکل 3-2- تغییرات در حین شبیه سازی از موتور
3-4-3- استخراج روابط تحلیلی جهت محاسبه اندوکتانسها و مشتق آنها
شکل 3-3- تغییرات اندوکتانس خودی فاز a استاتور بر حسب تغییرات ضریب اشباع و موقعیت چگالی شار فاصله هوایی
شکل 3-4- تغییرات اندوکتانس خودی مش 1 روتور (بالا) و مشتق آن نسبت به موقعیت روتور (پایین) بر حسب تغییرات ضریب اشباع و موقعیت روتور به ازای
شکل 3-5- تغییرات اندوکتانس متقابل فاز a استاتور و مش 1 روتور (La-1) و مشتق آن نسبت به موقعیت روتور (dLa-1) بر حسب تغییرات ضریب اشباع و موقعیت روتور به ازای
3-5- مدلسازی و شبیهسازی موتور القایی با عیب اتصال حلقه به حلقه در سیمپیچی استاتور
3-5-1- مدلسازی دورهای اتصال کوتاه شده
شکل 3-6- وقوع عیب اتصال حلقه به حلقه در یک فاز
3-5-2- معادلات موتور با عیب حلقه به حلقه
شکل 3-7- تغییرات تابع دور
شکل 3-8- تغییرات اندوکتانس خودی فاز d استاتور بر حسب تغییرات ضریب اشباع و موقعیت چگالی شار فاصله هوایی
شکل 3-9- تغییرات اندوکتانس متقابل فاز d استاتور و مش 1 روتور (Ld-1) و مشتق آن نسبت به موقعیت روتور (dLd-1) بر حسب تغییرات ضریب اشباع و موقعیت روتور به ازای برای فاز با 14 حلقه اتصال کوتاه شده
3-6- تعیین مقادیر
3-6-1- الگوریتم ژنتیک
شکل 3-10- روند کار الگوریتم ژنتیک
شکل 3-11- نمودار ولتاژ برحسب جریان بی باری حاصل از تخمین پارامتر و تست آزمایشگاهی
شکل 3-12- سرعت همگرایی الگوریتم ژنتیک
3-7- شبیهسازی و بررسی نتایج
شکل 3-13- طیف نرمالیزه جریان خط استاتور برای موتور با 14 حلقه اتصال کوتاه حاصل از نتایج عملی (a و b)، شبیه سازی با اشباع (c و d) و شبیه سازی بدون اشباع (e و f) در بی باری (a و c و e) و زیر بار کامل (b و d و f)
شکل 3-14- طیف نرمالیزه جریان خط استاتور برای موتور با 21 حلقه اتصال کوتاه حاصل از نتایج عملی (a و b)، شبیه سازی با اشباع (c و d) و شبیه سازی بدون اشباع (e و f) در بی باری (a و c و e) و زیر بار کامل (b و d و f)
جدول 3-1- نتایج عملی و شبیهسازی با اثر اشباع و همچنین بدون آن برای دامنه هارمونیک سوم جریان استاتور
شکل 3-15- نمودار جریان توالی منفی استاتور موتور القایی با 21 حلقه اتصال کوتاه شده زیر بار کامل حاصل از نتایج a) آزمایشگاهی، b) شبیه سازی با در نظر گرفتن اثر اشباع و c) شبیه سازی بدون در نظر گرفتن اثر اشباع
جدول 3-2- نتایج عملی و شبیهسازی با اثر اشباع و همچنین بدون آن برای دامنه جریان توالی منفی استاتور
شکل 3-16- شاخص CCP حاصل از شبیه سازی با و بدون اشباع مغناطیسی و عملی a) با 9 حلقه و b) 13 حلقه اتصال کوتاه شده
شکل 3-17- نوسان پاندولی حاصل از نتایج عملی
فصل چهارم
بررسی نتایج حاصل از شبیه سازی
جدول 4-1- شاخصهای عیب اتصال حلقه در موتور بیبار با 2% نامتعادلی تغذیه- MCCM
جدول 4-2- شاخصهای عیب اتصال حلقه در موتور زیر نصف بار کامل با2% نامتعادلی تغذیه- MCCM
جدول 4-3- شاخصهای عیب اتصال حلقه در موتور زیر بار کامل با 2% نامتعادلی تغذیه- MCCM
جدول 4-4- شاخصهای عیب اتصال حلقه در موتور بیبار با 5% نامتعادلی تغذیه- MCCM
جدول 4-5- شاخصهای عیب اتصال حلقه در موتور زیر نصف بار کامل با 5% نامتعادلی تغذیه- MCCM
جدول 4-6- شاخصهای عیب اتصال حلقه در موتور زیر بار کامل با 5% نامتعادلی تغذیه- MCCM
جدول 4-7- شاخصهای عیب اتصال حلقه در موتور بیبار با 2% نامتعادلی تغذیه- SMCCM
جدول 4-8- شاخصهای عیب اتصال حلقه در موتور زیر نصف بار کامل با 2% نامتعادلی تغذیه- SMCCM
جدول 4-9- شاخصهای عیب اتصال حلقه در موتور زیر بار کامل با 2% نامتعادلی تغذیه- SMCCM
جدول 4-10- شاخصهای عیب اتصال حلقه در موتور بی بار با 5% نامتعادلی تغذیه- SMCCM
جدول 4-11- شاخصهای عیب اتصال حلقه در موتور زیر نصف بار کامل با 5% نامتعادلی تغذیه-SMCCM
جدول 4-12- شاخصهای عیب اتصال حلقه در موتور زیر بار کامل با 5% نامتعادلی تغذیه- SMCCM
جدول 4-13- بررسی حساسیت جریان توالی منفی استاتور به عوامل جنبی مختلف
شکل4-1- نمودار میلهای حساسیت جریان توالی منفی استاتور در برابر عوامل جانبی
جدول 4-14- بررسی حساسیت امپدانس ظاهری توالی منفی استاتور به عوامل جنبی مختلف
شکل4-2- نمودار میله ای حساسیت امپدانس ظاهری توالی منفی استاتور در برابر عوامل جانبی
جدول 4-15- بررسی حساسیت دامنه هارمونیک اصلی جریان فاز a استاتور به عوامل جنبی مختلف
جدول 4-16- بررسی حساسیت اختلاف فاز بین جریان فاز a و b استاتور به عوامل جنبی مختلف
شکل4-3- نمودار میله ای حساسیت دامنه هارمونیک اصلی جریان فاز a استاتور در برابر عوامل جانبی
شکل4-4- نمودار میلهای حساسیت اختلاف فاز بین جریان فاز a و b استاتور در برابر عوامل جانبی
جدول 4-17- بررسی حساسیت دامنه هارمونیک سوم جریان فاز a استاتور به عوامل جنبی مختلف
شکل4-5- شاخص CCP برای موتور
شکل4-6- نوسان پاندولی
شکل4-7- نوسان پاندولی
فصل پنجم
شاخص پیشنهادی برای شناسایی عیب سیمپیچی استاتور
5-1- مقدمه
5-2- روش تخمین حالت اندوکتانس معادل استاتور
5-3- چگونگی تاثیر تعداد حلقههای اتصال کوتاه شده بر دامنه هارمونیکهای اندوکتانس استاتور
شکل5-1- تخمین اندوکتانس معادل فاز استاتور موتور سالم در طول زمان در بیباری از روی نمونههای ولتاژ و جریان حاصل
شکل5-2- طیف فرکانس نرمالیزه اندوکتانس معادل محاسبه شده از سیگنالهای ولتاژ و جریان ثبت شده در آزمایشگاه برای موتور
شکل5-3- طیف فرکانس نرمالیزه اندوکتانس معادل محاسبه شده از سیگنالهای ولتاژ و جریان حاصل از شبیه سازی موتور با 5 حلقه اتصال کوتاه شده
جدول5-1- دامنه هارمونیکهای مختلف اندوکتانس استاتور در برابر تعداد حلقههای اتصال کوتاه شده در سیم پیچی استاتور
5-4- تاثیر میزان بار، نامتعادلی تغذیه و اشباع مغناطیسی بر دامنه هارمونیکهای اندوکتانس استاتور
شکل5-4- منحنی تغییرات دامنه نرمالیزه هارمونیکهای
شکل5-5- منحنی تغییرات دامنه نرمالیزه هارمونیکهای
جدول5-2- دامنه هارمونیکهای مختلف اندوکتانس استاتور در برابر تغذیه متعادل و تغذیه با 2% نامتعادلی
شکل 5-6- نمودار میلهای حساسیت هارمونیک دوم اندوکتانس استاتور در برابر عوامل جانبی
فصل ششم
نتیجه گیری و پیشنهادات
6-1- نتیجهگیری
6-2- نوآوریهای پایاننامه
6-3- پیشنهادات
مراجع
![]()
مطالعه و بررسی عیوب و محاسن راه اندازهای موتورهای الکتریکی

عنوان تحقیق: مطالعه و بررسی عیوب و محاسن راه اندازهای موتورهای الکتریکی
فرمت فایل: word
تعداد صفحات: 113
شرح مختصر:
از آنجایی که امروزه راه اندازی موتورهای الکتریکی یکی از مسائل و دغدغه های بزرگ کارخانه های صنعتی و شرکت های تولیدی و نیز تولید کنندگان نیروی برق و شرکت های وابسته میباشد در این پروژه به بررسی برخی از این راه اندازها می پردازیم و محاسن و معایب آنها را مورد بررسی علمی قرار میدهیم.
از دلایل اهمیت موضوع شوک های الکتریکی و مکانیکی شدیدی می باشد که در زمان راه اندازی به شبکه برق رسانی و موتور وارد و سبب استهلاک شدید دستگاه های موجود و بالا بردن هزینه های اقتصادی می شود . بنابراین استفاده از راه انداز های مناسب بخصوص در مورد موتورها با توان های بیش از چندین اسب بخار در کاهش هزینه های برق مصرفی و نیز هزینه های نگهداری و تعمیر تاثیر بسزایی دارد.
فهرست مطالب
1 ) کلیات موتور آسنکرون سه فاز : 1
1 - 1 ) ساختمان موتورهای القایی سه فاز 2
1-1 - 1 ) استاتور : 2
1-1 - 2 ) رتور : 3
1-1 -3 ) حلقه های لغزان : 4
1 - 1 -4 ) جاروبک ها : 4
1 - 1- 5 ) یاتاقان و بدنه : 4
1 – 2 ) عملکرد موترهای القایی سه فاز: 5
1 – 2 – 1 ) موتور ساکن 5
1 – 2 -2 ) مکانیزم تولید گشتاور در موتور القایی ( آسنکرون ) : 9
1 – 2 – 3 ) موتور گردان : 14
1 – 2 – 4 ) موتور در شرایط ماندگار : 22
1 - 3 ) موتور فقس سنجابی : 25
2 ) انواع روشهای راه اندازی موتور القایی سه فاز: 28
2 – 1 ) روش راه اندای مستقیم : 30
2 – 2 ) روش راه اندازی توسط افزایش مقاومت رتور : 31
2 – 2 – 1 ) موتورهای رتور سیم پیچی شده : 31
2 – 2 – 2 ) Liquide starter : 37
2 – 2 – 3 ) درایور راه اندای کرامی : 38
2 – 2 – 4 ) راه اندازی موتورهای قفس سنجابی با توجه به جریان و مقاومت رتور : 40
الف – کلاس A : 40
ب – کلاس D : 41
ج – کلاسهای C , B : 41
د – رتورهایی با میله های عمیق : 41
ه – موتورهای قفس سنجابی دوبل : 42
2-3) انتخاب ولتاژ موتور 43
2-3-1) راه اندازی موتور قفسه ای با کاهش ولتاژ استاتور 43
2-4 ) راه اندازی با استفاده از کلید ستاره مثلث : 46
2-5) روش کلاج گریز از مرکز 49
2-6) پیک جریان حین راه اندازی 50
2-7) دینامیک راه اندازی 51
موتور با بار خالص : 53
گرم شدن رتور : 53
2-8) راه اندازی موتورهای بزرگ به کمک خازن 54
2-8-1) مشکل راه اندازی موتورهای القایی بزرگ : 55
2-8-2) عملکرد یک سیستم راه اندازی خازنی 56
3) راه اندازی تریستوری موتورهای القایی 57
مقدمه58
3-2 ( مدهای کنترل62
3-2-1( کنترل راه اندازی63
3-2-2( کنترل شتاب راه اندازی63
3-3) مشخصات راه اندازهای تریستوری67
3 -4( شرح مدارهای متداول راه اندازهای تریستوری68
3-5) مدار قدرت68
3-5-1( معرفی تریستور69
3-5-1-1) مدل دو ترانزیستوری تریستور70
3-5-1-2) روش های روشن شدن تریستور71
3-6) مدار فرمان72
3-6-1) مدار آتش کننده74
3-6-2 ) مدار تقویت کننده: 75
3-6-3) مزیت عمده راه اندازی موتور به شیوه تریستوری و انتقال زاویه آتش76
3-6-4 ) مدار خطای جریان77
3-7) طراحی و بررسی مدارعملی و ساده راه انداز نرم موتور آسنکرون (القایی77
3-7-1) کنترل79
3-7-2) نوسانساز موج دندانه اره ای84
3-7-3 ) کنترل زاویه آتش 86
3-7-4 ) مقایسه کننده88
3-7-5) ایزوله کننده مدار قدرت و مدار فرمان89
3-7-6) رلة اضافه ولتاژ و افت ولتاژ90
3-7-7) رلة اضافه جریان (Over Current) 92
3-8) نظام هماهنگ و 93
3-8-1) لزوم استفاده از نظام ثابت95
3-8-2) توضیح دربارة PWM 97
3-8-3) مدارات اینورتر100
3-8-4) رکتیفایرها102
3-9 ) مقایسه قیمت تمام شده انواع راه اندازها : 111
3-10) نتیجه : 113
![]()